Kolegové, prosím o radu s naprogramováním systému pro řízení přejezdu (bez závor) s Arduinem v ANALOGOVÉM kolejišti (PWM napájení).
Původně jsem vycházel z příkladů na Vejrov.cz a snažím se již delší dobu předělat zde uváděné programy Arduino 5 a Arduino 8 pro přejezd bez závor, řízený Arduinem na dvojkolejnou trať a nedaří se a nedaří. Ambicí ještě k tomu bylo předělat to na pouze na dva IR senzory na každé koleji, ale tam jsem asi nejvíc narazil.
Po diskuzi s autorem jsem změnil systém z IR senzorů na snímání proudu do odděleného úseku s přejezdem pomocí modulu ACS712 (Hallova sonda) bez použití IR senzorů.
Zapojení je jednoduché, napájení úseku s přejezdem je přes tento senzor, jinak nic jiného.
Ve chvíli kdy se v úseku objeví lokomotiva, má odběr, senzor detekuje proud a to splní podmínku pro výstražné červené světlo. Když úsek opustí, opět se rozsítí bílá. Dvojkolejnost přejezdu je v takové chvíli jednoduše řešitelná, prostě se bude odběr kontrolovat ve dvou větvích.
Základní program takto funguje pěkně, co jsem ale nevyřešil je situace kdy lokomotiva v úseku zastaví. Zkoušel jsem to přes variantu měření napětí na kolejích, problém je se smyčkovitostí programu, kdy se musí srovnávat aktuální měření se stavem z minula - a to se mi nepodařilo. Vždycky se nějak zacyklím v logice a syntaxi a neprolomím to.
Níže je zjednodušená forma programu, finální by byla pro dvě koleje a taky pro vyzvánění s PCM samplem (vyzkoušeno funkční)
Dokázal by někdo navrhnout úpravu té logiky aby bylo to zastavení lokomotivy správně detekováno a stav zůstal obsazeno, dokud lokomotiva úsek neopustí? Díky
const int analogIn = A0; // vstup pro usek prejezdu
const int analogV = A1; // vstup pro napajeci napeti
int konstanta = 185; // konstanta pro přepočet naměřeného napětí na proud
int offset = 2500; // proměnná pro nastavení offsetu, polovina Vcc
int red1 = 2; // vystup cervene svetlo 1
int red2 = 3; // vystup cervene svetlo 2
int white1 = 4; // vystup bile svetlo
int stav = 0; // stav obsazeni prejezdu
int ledDelay = 400;
bool wait = true;
double zdroj = 0; //napajeci napeti
double proud = 0; //proud do useku prejezdu
int analog = 0;
double napeti = 0; // napeti na Hallove sonde
double soucet = 0; // vypocet proudu
void setup(){
pinMode(analogIn, INPUT);
pinMode(analogV, INPUT);
pinMode(red1, OUTPUT);
pinMode(red2, OUTPUT);
pinMode(white1, OUTPUT);
}
void loop()
{
for(int i=0;i<100;i++) // provedení stovky měření pro ustálení výsledku
{
// načtení hodnoty analogovych vstupu
analog = analogRead(analogIn);
zdroj = analogRead(analogV);
// přepočet napětí na proud
napeti = (analog * 5000.0) / 1023.0;
proud = (napeti - offset) / konstanta;
// uložení výsledku pro následné zprůměrování
soucet += proud;
}
proud = (soucet/100);// výpočet průměru ze stovky měření
if (proud < 0.05 || proud > 0.05)
{
stav = 0; // usek prejezdu neni obsazen
}
if (proud > 0.05 || proud < -0.05)
{
stav = 1; // usek prejezdu je obsazen
}
if (stav == 0)
{
if (wait == true){delay (1000);} //delay - délka zpoždění bílého světla 6000 = 6 sekund - max 32 000 = 32 sekund
wait = false;
digitalWrite(white1, HIGH);
delay(ledDelay);
digitalWrite(white1, LOW);
delay(ledDelay);
}
else
{
wait = true;
delay(10);
digitalWrite(red1, HIGH);
delay(ledDelay);
digitalWrite(red1, LOW);
delay(100);
digitalWrite(red2, HIGH);
delay(ledDelay);
delay(200);
digitalWrite(red2, LOW);
}
Diskuzní fórum železničních modelářů
Fórum pro českou komunitu železničních modelářů.
Arduino pro železniční přejezd - úprava logiky programu
Moderátoři: Michal Dalecký, Jarda H.
Příspěvků: 15
• Stránka 1 z 1
Arduino pro železniční přejezd - úprava logiky programu
![]() od OndraTT » úte 06 dub, 2021 7:01 pm
od OndraTT » úte 06 dub, 2021 7:01 pm
- OndraTT
- Příspěvky: 42
- Registrován: pon 18 lis, 2019 5:00 pm
Re: Arduino pro železniční přejezd - úprava logiky programu
![]() od ohruska » úte 06 dub, 2021 8:41 pm
od ohruska » úte 06 dub, 2021 8:41 pm
Asi tomu nerozumím.
Když mašina jede, odebírá proud, úsek sepne přejezd, do doby než mašina úsek opustí, úsek neodebírá žádný proud, přejezd se vypne.
Pokud mašina vjede do úseku, sepne přejezd, ale pokud v úseku zastaví, tak neteče žádný proud a přejezd se zase vypne, i když na přejezdu stojí mašina.
Tady asi žádná logika nepomůže.
Asi by musely být ty měřené úseky dva a dost daleko od sebe.
Pokud by mašina vjela do prvního úseku, sepnul by přejezd, potom by přejel do druhého úseku, a až by ho opustil tak by se přejezd vypnul.
Druhý úsek by musel být krátký a dostatečně daleko od přejezdu, jinak by mohla nastat stejná situace se zastavením mašiny ve druhém úseku.
A jak to bude fungovat , když bude mašina tlačit vagony?
Ota
Když mašina jede, odebírá proud, úsek sepne přejezd, do doby než mašina úsek opustí, úsek neodebírá žádný proud, přejezd se vypne.
Pokud mašina vjede do úseku, sepne přejezd, ale pokud v úseku zastaví, tak neteče žádný proud a přejezd se zase vypne, i když na přejezdu stojí mašina.
Tady asi žádná logika nepomůže.
Asi by musely být ty měřené úseky dva a dost daleko od sebe.
Pokud by mašina vjela do prvního úseku, sepnul by přejezd, potom by přejel do druhého úseku, a až by ho opustil tak by se přejezd vypnul.
Druhý úsek by musel být krátký a dostatečně daleko od přejezdu, jinak by mohla nastat stejná situace se zastavením mašiny ve druhém úseku.
A jak to bude fungovat , když bude mašina tlačit vagony?
Ota
- ohruska
- Příspěvky: 145
- Registrován: sob 04 led, 2020 9:50 pm
Re: Arduino pro železniční přejezd - úprava logiky programu
![]() od belgarat » úte 06 dub, 2021 8:44 pm
od belgarat » úte 06 dub, 2021 8:44 pm
if (proud < 0.05 || proud > 0.05)
{
stav = 0; // usek prejezdu neni obsazen
}
if (proud > 0.05 || proud < -0.05)
{
stav = 1; // usek prejezdu je obsazen
}
Prvni "if" je (temer) nadbytecny. Pdo hodnoty (-inf; 0,05) + (0,05; inf) se nejprve nastavi stav = 0 (proud = -1V vyhovi prvnimu IFu) a nasledne premasti na 1. Neudela to chybu, ale napis
- Kód: Vybrat vše
stav = (proud > 0.05 || proud < -0.05);
je to jednodussi, a neriskujes zapomenute minus (prvni IF, druha cast podminky)
Nepracujes vubec s namerenym napetim "zdroj" - jen se meri; neprumeruje se, s nicim se neporovnava. OK ?
TT ep. IVa-b; analog + NanoX, DR5000. Pseudoprogramator, pindac nesmyslu
http://modelwiki.klfree.net
http://modelwiki.klfree.net
- belgarat
- Příspěvky: 2428
- Registrován: čtv 27 pro, 2012 9:36 pm
- Bydliště: Hřebeč u Kladna
Re: Arduino pro železniční přejezd - úprava logiky programu
![]() od OndraTT » úte 06 dub, 2021 9:00 pm
od OndraTT » úte 06 dub, 2021 9:00 pm
Belgarat, díky.
To napájecí napětí jsem dělal pokusy ale nechtěl jsem to tam nechávat abych případného poradce nezmatl. Nepodařilo se mi totiž tu kontrolu správně vystavět.
Pro ohruska - toto v podstatě odpovídá klasické funkci přejezdu se 4 senzory a to jak historická klasika tak náhradou za IR senzory. V tomto zapojeni to funguje pekne přesně podle zapojeni na Vejrov.cz
Slovně řečeno chybí podmínka/logika na zachování výstrahy pro případ nulového napájecího napětí v situaci ze predtim běžela výstraha.
To napájecí napětí jsem dělal pokusy ale nechtěl jsem to tam nechávat abych případného poradce nezmatl. Nepodařilo se mi totiž tu kontrolu správně vystavět.
Pro ohruska - toto v podstatě odpovídá klasické funkci přejezdu se 4 senzory a to jak historická klasika tak náhradou za IR senzory. V tomto zapojeni to funguje pekne přesně podle zapojeni na Vejrov.cz
Slovně řečeno chybí podmínka/logika na zachování výstrahy pro případ nulového napájecího napětí v situaci ze predtim běžela výstraha.
- OndraTT
- Příspěvky: 42
- Registrován: pon 18 lis, 2019 5:00 pm
Re: Arduino pro železniční přejezd - úprava logiky programu
![]() od belgarat » úte 06 dub, 2021 9:08 pm
od belgarat » úte 06 dub, 2021 9:08 pm
OndraTT píše:Slovně řečeno chybí podmínka/logika na zachování výstrahy pro případ nulového napájecího napětí v situaci ze predtim běžela výstraha.
Potrebujes taky pozdrzet pad stav 1 > 0, po nejakou ochrannou dobu a behem ni sledovat napajeci napeti. Diky nejake uchylarne totiz muzes namerit odebirany proud 0 driv nez spadne merene napajeci napeti, staci kdyz se ti spatne trefi ta blikajici smycka
Zkus tohle: https://www.diffchecker.com/QhJTvq2e (budou tam chyby, nezkousel jsem to ani prelozit)
Jinak - Pouzij Serial.begin(115200); a vypisuj si namerene hodnoty a stavove promenne ... pri ladeni a zkoumani co vlastne ti program dela to DOST pomaha
TT ep. IVa-b; analog + NanoX, DR5000. Pseudoprogramator, pindac nesmyslu
http://modelwiki.klfree.net
http://modelwiki.klfree.net
- belgarat
- Příspěvky: 2428
- Registrován: čtv 27 pro, 2012 9:36 pm
- Bydliště: Hřebeč u Kladna
Re: Arduino pro železniční přejezd - úprava logiky programu
![]() od OndraTT » stř 07 dub, 2021 4:59 pm
od OndraTT » stř 07 dub, 2021 4:59 pm
Tak jsem vyzkoušel na kolejích a protože to nefungovalo (jen při vypnutí napájení jsem získal 2 cykly červené a stejně se to přeplo do bílé), tak jsem začal zkoumat kde je chyba. No a dalšímy kroky jsem dospěl k tomu že ta kontrola pomocí napájecího napětí nebude tak přímočará
a) v programu jsem to měl špatně napsané, napětí z analogového vstupu se totiž nepřepočítávalo na reálné napětí, ale zůstalo jen 0-1023...drobnost
b) málem jsem si odpálil Arduino, než jsem si uvědomil že max. na vstupu AD převodníku je 5 V - kdežto napájení bude až třeba 14V..naštěstí jsem zkoušel jezdit krokem
c) ok, tak udělám odporový dělič 1:3 aby bylo vždy pod 5V - jenže pak mi došlo že se může měnit polarita napětí a tím vlastně i dělicí poměr - takže to zase odpálí vstup AD
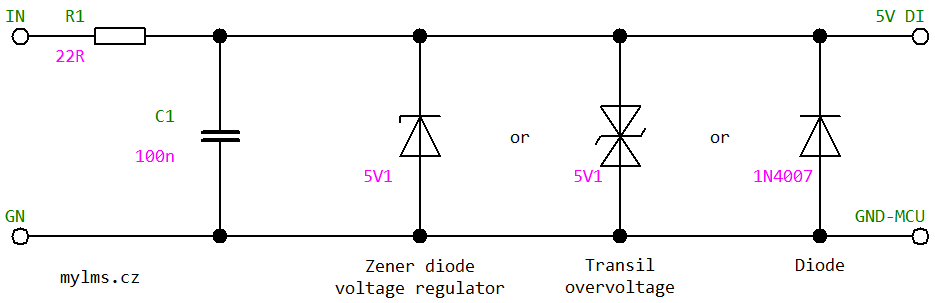
Takže varianta je zřejmě dát tam usměrňovací můstek, za ním dělič 1:3, upravit SW tak aby toto napětí správně počítal a pak pokračovat s funkcí kódu...uff uff
Kdybych koupil hotový modul za pětikilo už do dávno mám
a) v programu jsem to měl špatně napsané, napětí z analogového vstupu se totiž nepřepočítávalo na reálné napětí, ale zůstalo jen 0-1023...drobnost
b) málem jsem si odpálil Arduino, než jsem si uvědomil že max. na vstupu AD převodníku je 5 V - kdežto napájení bude až třeba 14V..naštěstí jsem zkoušel jezdit krokem
c) ok, tak udělám odporový dělič 1:3 aby bylo vždy pod 5V - jenže pak mi došlo že se může měnit polarita napětí a tím vlastně i dělicí poměr - takže to zase odpálí vstup AD
Takže varianta je zřejmě dát tam usměrňovací můstek, za ním dělič 1:3, upravit SW tak aby toto napětí správně počítal a pak pokračovat s funkcí kódu...uff uff
Kdybych koupil hotový modul za pětikilo už do dávno mám
- OndraTT
- Příspěvky: 42
- Registrován: pon 18 lis, 2019 5:00 pm
Re: Arduino pro železniční přejezd - úprava logiky programu
![]() od belgarat » stř 07 dub, 2021 5:10 pm
od belgarat » stř 07 dub, 2021 5:10 pm
Dej si tam ten Serial.println() at vidis co se deje 
Pokud napajeci napeti spadlo na 0 (lhostejno jakym zpusobem) a zustalo tam 2 cykly -- nech si vypisovat hodnotu "zdroj", "odebiraProud", a "stojime" a vysledky hod sem
Jeste mne napada: meris napeti, ale mas k analogV nejaky pulldown odpor pro pripad, ze napeti neni zadne - zdroj odpojeny ?
Pokud napajeci napeti spadlo na 0 (lhostejno jakym zpusobem) a zustalo tam 2 cykly -- nech si vypisovat hodnotu "zdroj", "odebiraProud", a "stojime" a vysledky hod sem
Jeste mne napada: meris napeti, ale mas k analogV nejaky pulldown odpor pro pripad, ze napeti neni zadne - zdroj odpojeny ?
TT ep. IVa-b; analog + NanoX, DR5000. Pseudoprogramator, pindac nesmyslu
http://modelwiki.klfree.net
http://modelwiki.klfree.net
- belgarat
- Příspěvky: 2428
- Registrován: čtv 27 pro, 2012 9:36 pm
- Bydliště: Hřebeč u Kladna
Re: Arduino pro železniční přejezd - úprava logiky programu
![]() od OndraTT » stř 07 dub, 2021 6:38 pm
od OndraTT » stř 07 dub, 2021 6:38 pm
Puvodne jsem tam pull down nemel, ale tim ze to ted budu muset predelat kvuli vysokemu napeti tak tsm bude ofporovy delic..nebo je to špatná uvaha?
Serial.print jsem si dal diky tomu jsem prusel na to ze neco s merenim napeti nefunguje...jeste zkusim s prilozim
Serial.print jsem si dal diky tomu jsem prusel na to ze neco s merenim napeti nefunguje...jeste zkusim s prilozim
- OndraTT
- Příspěvky: 42
- Registrován: pon 18 lis, 2019 5:00 pm
Re: Arduino pro železniční přejezd - úprava logiky programu
![]() od belgarat » stř 07 dub, 2021 6:50 pm
od belgarat » stř 07 dub, 2021 6:50 pm
OndraTT píše:Puvodne jsem tam pull down nemel, ale tim ze to ted budu muset predelat kvuli vysokemu napeti tak tsm bude ofporovy delic..nebo je to špatná uvaha?
Serial.print jsem si dal diky tomu jsem prusel na to ze neco s merenim napeti nefunguje...jeste zkusim s prilozim
No zarazi mne, ze po 2 cyklech to preslo do stavu 'volno', pricemz pokud je spravne detekovano 'regulator bez napeti' tak se 'stav' vubec nemeni
TT ep. IVa-b; analog + NanoX, DR5000. Pseudoprogramator, pindac nesmyslu
http://modelwiki.klfree.net
http://modelwiki.klfree.net
- belgarat
- Příspěvky: 2428
- Registrován: čtv 27 pro, 2012 9:36 pm
- Bydliště: Hřebeč u Kladna
Re: Arduino pro železniční přejezd - úprava logiky programu
![]() od zdeno » stř 07 dub, 2021 7:23 pm
od zdeno » stř 07 dub, 2021 7:23 pm
nevim, ci neuvazujete spatne ?
Pokud loko stoji, tak nevidim problem v tom, ze se prejezd uvolni.
Pokud loko stoji, tak nevidim problem v tom, ze se prejezd uvolni.
moje konstrukce jsou na https://www.railnet.sk/autori.php?kto=aut&cislo=10
-

zdeno - Příspěvky: 3207
- Registrován: pon 11 črc, 2011 8:54 am
Re: Arduino pro železniční přejezd - úprava logiky programu
![]() od belgarat » stř 07 dub, 2021 7:59 pm
od belgarat » stř 07 dub, 2021 7:59 pm
Samozrejme ze tam MAM chybu. Prehlidl jsem ze 'zdroj' se neupravuje rozsahem, zustava nikoliv V ale 0-1023. takze namisto nejakeho stojime = +-0.05 pekne usmernit diodovym mustkem, a staci treba zdroj < 20 (nejake dostatecne male cislo odpovidajici napeti tak 1.5V, kdy motorek tutove stoji). Mea culpa.
TT ep. IVa-b; analog + NanoX, DR5000. Pseudoprogramator, pindac nesmyslu
http://modelwiki.klfree.net
http://modelwiki.klfree.net
- belgarat
- Příspěvky: 2428
- Registrován: čtv 27 pro, 2012 9:36 pm
- Bydliště: Hřebeč u Kladna
Re: Arduino pro železniční přejezd - úprava logiky programu
![]() od look23 » stř 07 dub, 2021 8:50 pm
od look23 » stř 07 dub, 2021 8:50 pm

H0, ČSD epocha IV, V - z21+MM
- look23
- Příspěvky: 1276
- Registrován: ned 17 lis, 2013 2:20 pm
Re: Arduino pro železniční přejezd - úprava logiky programu
![]() od OndraTT » stř 07 dub, 2021 10:01 pm
od OndraTT » stř 07 dub, 2021 10:01 pm
Děkuji všem, s belgaratem v pozadí probíráme postupně krok za krokem.
Co se týče vstupu, dal jsem tam můstek a dělič 10k/47k (jinou kombinaci jsem rychle nenašel), Zenerku žádnou nemám. S tímto děličem tam dostávám cca max 2V. Země jsem spojil tu na - můstku a Gnd Arduina napájeného z USB notebooku. Zatím přežilo i s ntb v síti. V kolejišti to bude s PWM pro koleje a přes 7805 pro Arduino, napájení ze stejného adaptéru.
Nicméně v případě nulové polohy tam čísla na analog vstupu poskakuji mezi cca 50-120, nějaká duchařina (testují na stole s analogovým Tillig ovladačem), tak to ma ještě nějaké mouchy ve funkci.
To zdeno - měl jsem za to ze i když loko zastaví v chráněném úseku, tak výstraha pořád běží i ve skutečnosti, dokud jej neopustí - nebo to myslíš jinak?
Když se zadaří, dam sem finální kód pro další použití
Co se týče vstupu, dal jsem tam můstek a dělič 10k/47k (jinou kombinaci jsem rychle nenašel), Zenerku žádnou nemám. S tímto děličem tam dostávám cca max 2V. Země jsem spojil tu na - můstku a Gnd Arduina napájeného z USB notebooku. Zatím přežilo i s ntb v síti. V kolejišti to bude s PWM pro koleje a přes 7805 pro Arduino, napájení ze stejného adaptéru.
Nicméně v případě nulové polohy tam čísla na analog vstupu poskakuji mezi cca 50-120, nějaká duchařina (testují na stole s analogovým Tillig ovladačem), tak to ma ještě nějaké mouchy ve funkci.
To zdeno - měl jsem za to ze i když loko zastaví v chráněném úseku, tak výstraha pořád běží i ve skutečnosti, dokud jej neopustí - nebo to myslíš jinak?
Když se zadaří, dam sem finální kód pro další použití
- OndraTT
- Příspěvky: 42
- Registrován: pon 18 lis, 2019 5:00 pm
Re: Arduino pro železniční přejezd - úprava logiky programu
![]() od zdeno » čtv 08 dub, 2021 7:37 am
od zdeno » čtv 08 dub, 2021 7:37 am
OndraTT píše:To zdeno - měl jsem za to ze i když loko zastaví v chráněném úseku, tak výstraha pořád běží i ve skutečnosti, dokud jej neopustí - nebo to myslíš jinak?
Nemusi to tak byt, vsak existuji prejezdy, ktere se daji vypnout, protoze by je posun neustale zapinal.
Ten analog je proste hodne omezujici a pokud neni napajeni, neni proudova detekce.
---
Mozna by pomohlo pocitani naprav ?
Teda pokud jsou v useku napocitane napravy, tak se usek neuvolni.
moje konstrukce jsou na https://www.railnet.sk/autori.php?kto=aut&cislo=10
-
zdeno - Příspěvky: 3207
- Registrován: pon 11 črc, 2011 8:54 am
Re: Arduino pro železniční přejezd - úprava logiky programu
![]() od Pater » čtv 22 dub, 2021 10:27 pm
od Pater » čtv 22 dub, 2021 10:27 pm
Já bych se až tak nedivil. Málokterý PWM ovladač při nulové poloze nedává žádné impulsy, většinou fungují se střídou v rozsahu 5 - 95%. Pokud chceš na analogovém vstupu měřit napětí (střední hodnotu PWM), chtělo by to nějaký filtr, pouhé usměrnění můstkem + napěťový dělič nebude stačit.OndraTT píše:Nicméně v případě nulové polohy tam čísla na analog vstupu poskakuji mezi cca 50-120, nějaká duchařina (testují na stole s analogovým Tillig ovladačem), tak to ma ještě nějaké mouchy ve funkci.
N, DCC, NanoX, Rocrail, Paterweb
-

Pater - Příspěvky: 500
- Registrován: stř 20 črc, 2011 4:52 pm
- Bydliště: Karviná
Příspěvků: 15
• Stránka 1 z 1
Kdo je online
Uživatelé procházející toto fórum: Žádní registrovaní uživatelé a 1 návštěvník