Začátečníkům bych poradil, aby se nejdříve seznámili s pojmy. Stačí na to fyzika pro základní školy.
________________________________________
Střídavý proud je definován jako proud, který mění (střídá) svůj
směr. Může se periodicky opakovat nebo může být neperiodický, náhodný (šum).
Stejnosměrný proud je definován tak, že teče jedním (stejným) směrem. Může mít stálou hodnotu nebo může pulzovat.
________________________________________
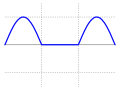
Stejnosměrný proud vytvoříme ze střídavého proudu
usměrněním. Nejjednodušší usměrnění je pomocí jedné diody. Výsledný proud sice pulzuje, ale teče jen jedním směrem, proto je
stejnosměrný.

 (zdroj: wikibooks.org)
(zdroj: wikibooks.org)________________________________________
V kolejích digitálně řízeného kolejiště je signál DCC, který je střídavý. Má obdélníkový průběh.
V lokomotivách je běžně stejnosměrný motor. Aby se motor rozjel, potřebuje stejnosměrný proud. Ten mu dodá dekodér nebo regulovatelný napáječ kolejí (u analogového provozu). Dekodéry a moderní ovladače dodávají motorku proud pulzující s obdélníkovým průběhem, říká se tomu pulzně šířková modulace (PWM). V čase se mění pouze šířka impulzů, ale ne polarita, jedná se tedy stále o stejnosměrný proud. Směr se určí jednorázovým přepólováním a dále se opět posílají jen stejnosměrné pulzy, tentokrát ovšem záporného napětí.
________________________________________
Lokomotiva bez dekodéru postavená na PWM dostává pouze proud určený pro pohyb. Obvykle je maximální hodnota napětí omezena podle normy, pro běžné modelové velikosti na 12 voltů. Na případné nejkratší signály, které pro stojící lokomotivy neumějí levnější PWM generátory úplně potlačit, motor nereaguje. Proud sice projde vinutím motoru, ale protože ho nedokáže roztočit, chová se pro něj vinutí motoru jen jako odporová zátěž s minimálním odporem a proud se na tomto odporu přemění na tepelný výkon. Doba průchodu proudu je však v poměru k mezeře mezi signály tak malá (do jednotek procent), že se výkon proměněný v teplo téměř vůbec neprojeví. Naopak delší signály motor roztočí, čímž se mu zvedne vnitřní odpor (impedance), takže netopí a normálně funguje. Z toho plyne, že pulzní proud (PWM), dokonce ani jeho krátké impulzy na stojící motor, nemůže motor nijak ohrozit.
Lokomotiva bez dekodéru postavená na DCC signál dostává k motoru proud střídavý. V klidu má kladná a záporná část signálu shodnou velikost napětí, účinky sil vpřed i vzad se v motoru vyruší a motor stojí. K pohybu dochází tak, že se k celému signálu přidá proud stejnosměrný (střídavý se tzv. namoduluje na stejnosměrný). Střed onoho pulzování střídavého proudu se vlastně posune buď kladným nebo záporným směrem. Jakmile začne velikost kladných vln převažovat nad velikostí záporných, vlak se rozjede dopředu. Převažující velikost záporných půlvln střídavého signálu způsobí couvání. Rychlost je dána rozdílem kladného a záporného napětí, například, když má kladná vlna velikost napětí 10 V a záporná 6 V, rozdílem jsou +4 V, vlak jede vpřed jako na stejnosměrném napětí čtyř voltů. Nicméně i v klidu je do 12 voltového motorku neustále dodáván proud o velikosti napětí 16 V, který má snahu neustále motor střídavě roztáčet. A právě při rozběhu a přepólovávání má motor největší odběr proudu, protože se na něm projevuje vliv odporu vinutí. Změny jsou sice rychlé, ale trvají i během jízdy. Zejména u starších motorků se obvykle projevují vrčením a mírným zahříváním. I když lze takto lokomotivy bez dekodéru využívat, rozhodně to jejich motorům dlouhodobě neprospívá.
________________________________________
Některé digitální centrály provoz analogové lokomotivy na nulté adrese nepodporují (například Roco Multimaus).



