Takže po pár pokusech s reverzním modulem založeným na detekci zkratu, jsem začal hledat jiné řešení. Detekce zkratu se mi rozhodně nejevila jako něco, na co by se dalo spolehnout. Problematiku jsem řešil v ve vláknu věnující se problematice vratné smyčky viz
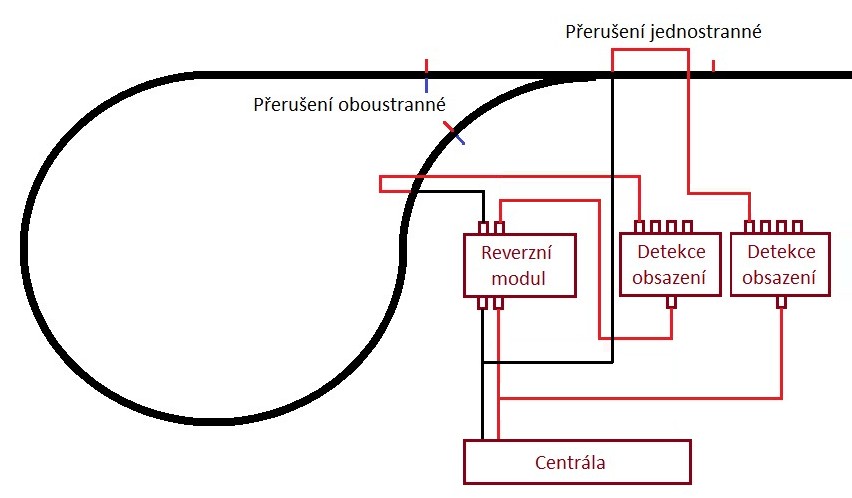
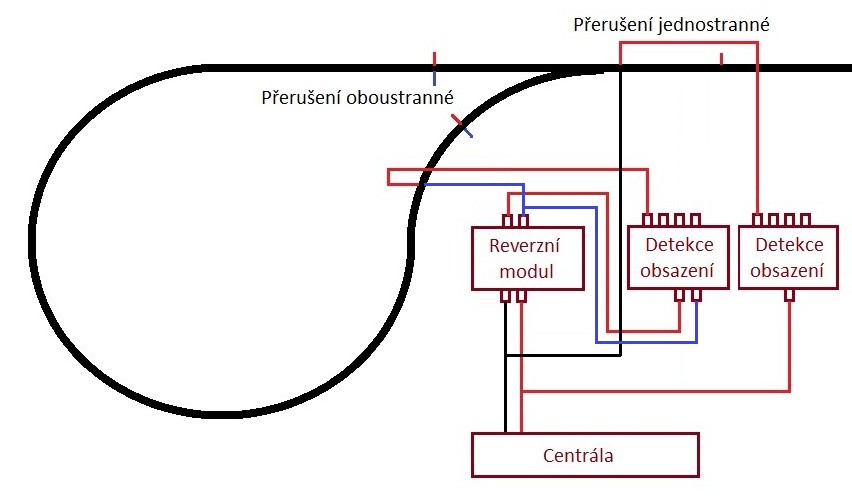
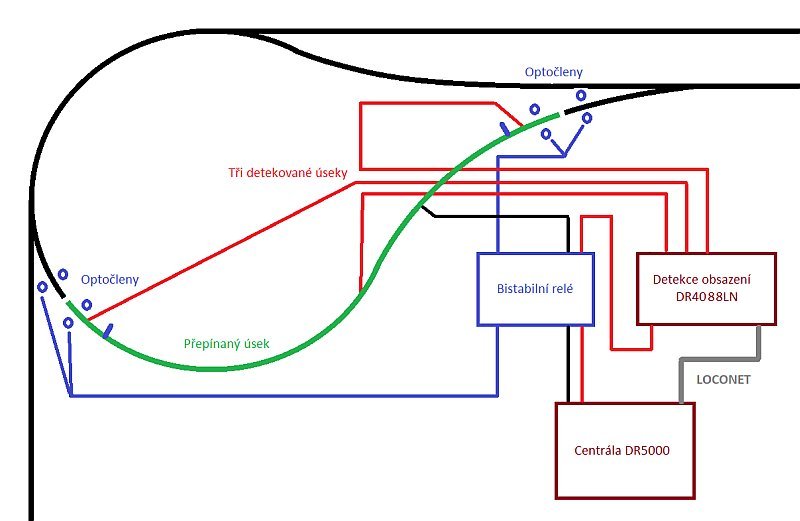
http://diskuze.modely.biz/viewtopic.php?f=7&t=260&start=60. Princip zapojení včetně detekce byl v konečné fázi zjednodušeně následující (přepínaný úsek obsahuje tři detekované úseky, abych zde případně mohl odstavit vlak):
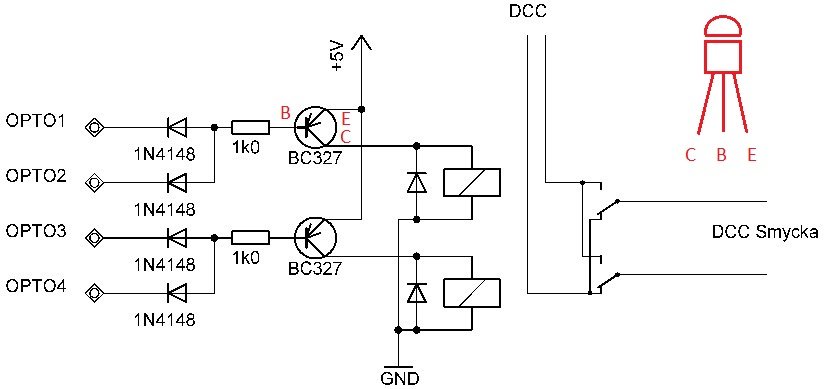
Pro ovládání jsem použil obvod, který mi navrhl
jipol57 a schéma vypadá následovně (to označení vývodů tranzistorů jsem si přidal já, neb elektronice nerozumím):
Použil jsem optočlen zakoupený zde:
https://laskarduino.cz/vstupni-periferie-cidla/131012-ir-opticky-infra-snimac-fc-51.htmlJak to dopadlo jsem popsal ve výše uvedeném vlákně (
http://diskuze.modely.biz/viewtopic.php?f=7&t=260&start=60). Takže již jen pár obrázků:
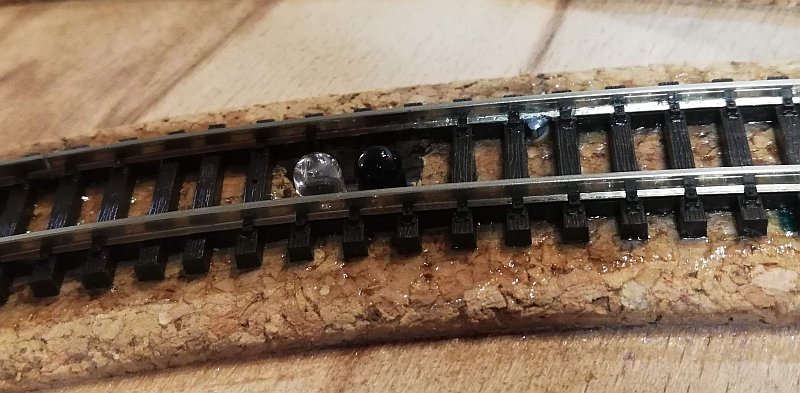
Optočlen sezhora (důležitá byla podélná montáž v ose kolejí a zarovnání na temeno kolejnice):
Optočleny zespodu (lepeno tavnou pistolí):
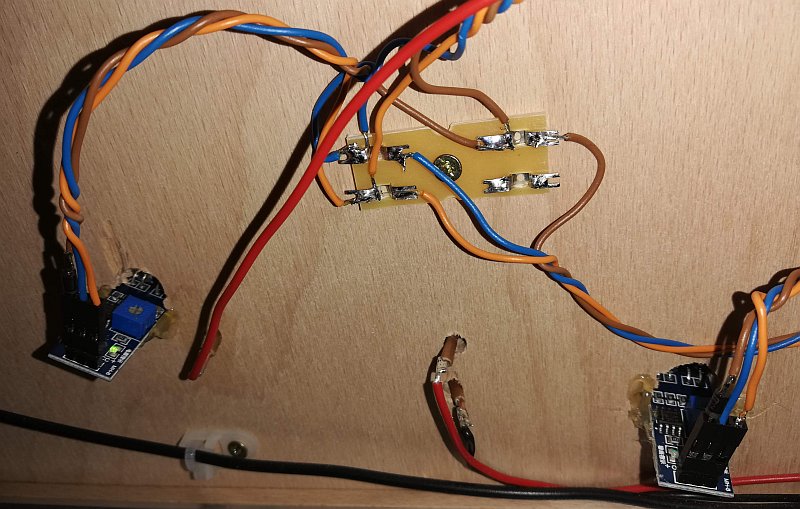
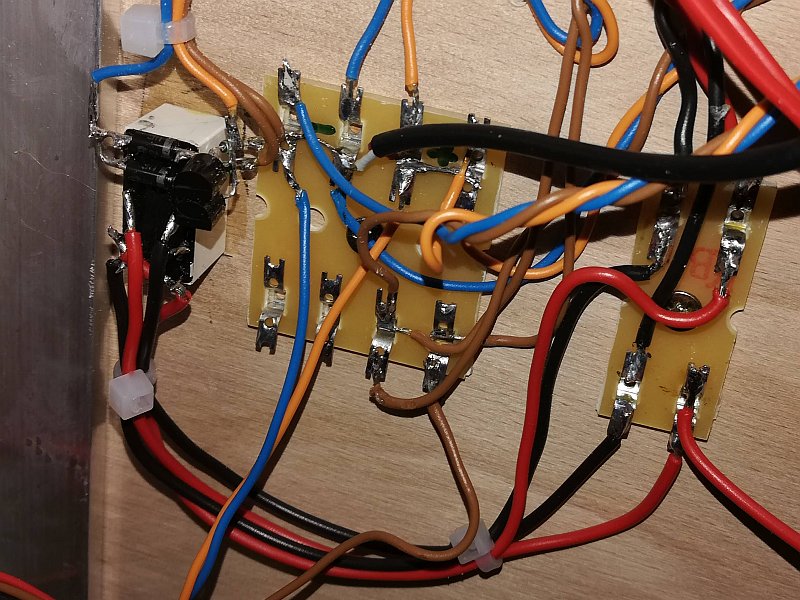
Veškeré součástky připájeny na relé (plošňáky dělat zatím neumím):
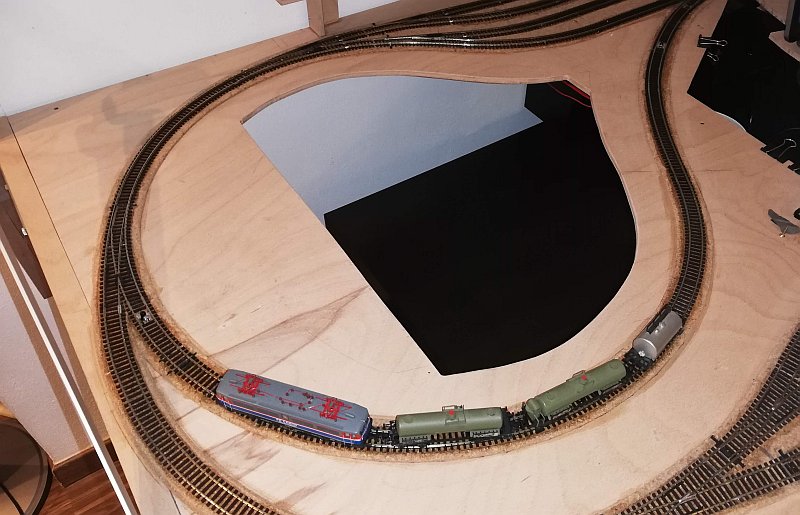
Prní průjezd smyčkou a hned úspěšný (úspěšných bylo i dalších padesát):
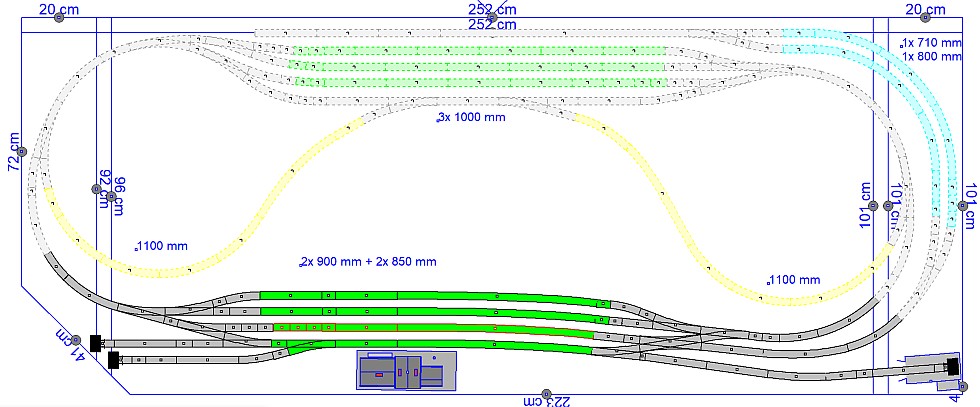
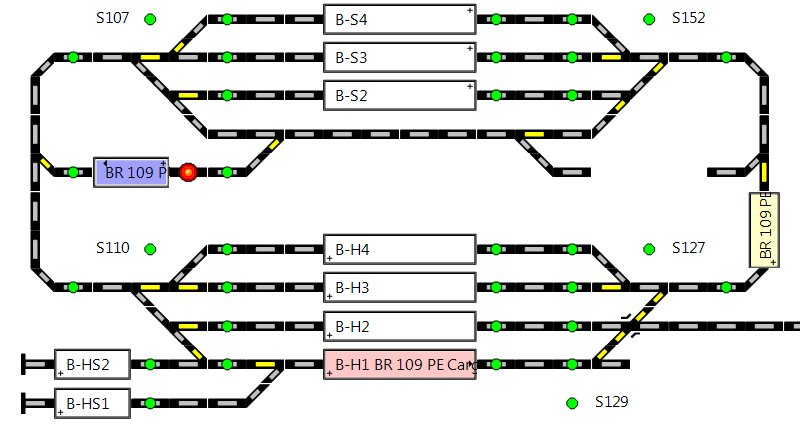
Doplnění ovládání průjezdu levou smyčkou do programu RocRail (detekce obsazení je řešena pomocí DR4088LN):
TT, panel 2520x1010 mm, epocha V, centrála DR5000, sběrnice LocoNet, sw RocRail, TC, MP1