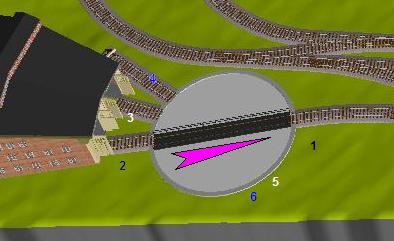
trochu si maluju jak udělám ovládání točny.
Mám před sebou spoustu otevřených otázek a rád bych se zeptal na váš názor jako odborné veřejnosti.
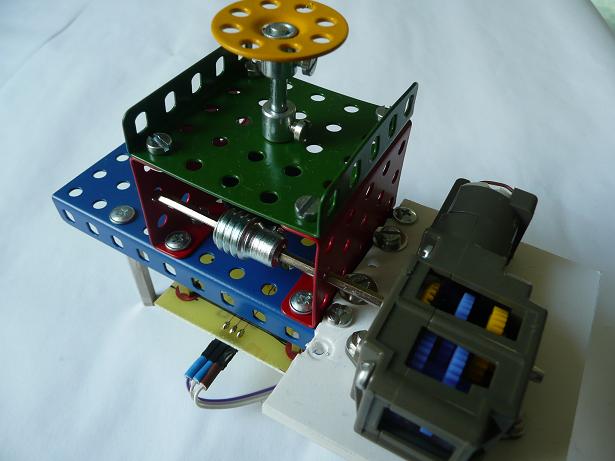
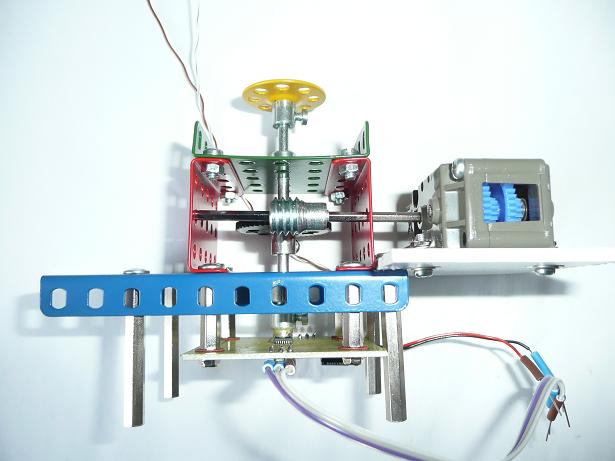
Naplánoval jsem si, že použiju běžnej motor - koupil jsem si převodovku Tamiya TM70167 a pak trochu Merkura a doplnil jsem ještě šnekovej převod.
Na snímání polohy je na spodní straně osy nalepenej magnet a pod ním přesnej kompas s přesností 12bit. To v praxi znamená 4096 kroků, to jest 0,087890625.
Pokud dobře počítám, tak to znamená maximální nepřesnost cca 0,3mm pro točnu s poloněrem 20cm (v mojí velikosti N mám točnu s poloměrem 8cm, takže nepřesnost 0,1mm).
Co je ale pro mne hlavní otázkou, je, jak udělat ovládání.
První verze, kterou mám hotovou pracuje jako vyhybkovej dekodér. V momentálním případě obsazuje 4 vyhybky. Momentálně mám nastavené 4 pozice kde se zastavuje - pokud tedy nastavím vyhybku 1 do pozice "rovně", tak se točna otočí na první nastavenej úhel. Pokud dám "rovně" druhou, otočí se na druhej nastavenej úhel.
Moje představa je taková, že točnu připojím na XBuss a v případě že opustí danou polohu, tak si sama pošle přestavení vyhybky "do odbočky", takže třeba na multimouse se bude zobrazovat poloha správně.
Chtěl jsem se zeptat na názor veřejnosti, jestli takovéto ovládání je správné? zejména jestli odpovídá požadavkům různých ovládacích programů?
Ještě bych mohl udělat výstup odpovídající zpětné vazbě, kde by byl právě jeden výstup aktivní, podle polohy.
Jindra