Je tam přiloženej html dokument, kde je to popsáno.
Verze 3.0 zastavuje čtení dat během pohybu serva, takže je možné, že nepřijme některý paket, nicméně pohyb serva je velmi přesný.
Verze 3.5 naopak čte data neustále, takže může dojít ke chvění serva při extrémně pomalém pohybu.
Verze 3.2 Čte neustále, ovládá však pouze 2 serva, zato ve 4 polohách - Servo 1 dostává polohy A1,B1,A2 a B2, Servo 3 dostává polohy A3,B3,A4,B4 (serva 2 a 4 se nepodporují) - to je vhodné pro 3 cestné vyhybky a pro CarSystem
Verze 3.4 Čte neustále, ovládá však pouze 1 servo, zato v 8 polohách - to je vhodné pro ovládání šuplíkových nádraží nebo malé točny velikosti Z a menší
Mimochodem - pro můj dekodér bude asi největší zátěž, pokud dáš rychlost otáčení na maximum (tedy 0 do CV3-6) a pak začneš rychle za sebou střídat polohy.
Diskuzní fórum železničních modelářů
Fórum pro českou komunitu železničních modelářů.
Servo dekodér
Moderátoři: Michal Dalecký, Jarda H., Rudolf
Re: Servo dekodér
![]() od fulda » pát 17 čer, 2011 1:24 pm
od fulda » pát 17 čer, 2011 1:24 pm
Za pravopisné chyby v této zprávě může moje učitelka češtiny.
-

fulda - Příspěvky: 5380
- Registrován: pon 09 srp, 2010 8:08 am
- Bydliště: Praha - Uhříněves
Re: Servo dekodér
![]() od male zvire » pát 17 čer, 2011 6:05 pm
od male zvire » pát 17 čer, 2011 6:05 pm
fulda píše:Realita je ale jinde, už jsem o tom taky v tomto fóru psal, ale klidně to napíšu znovu.
DCC příslušenství založené na procesorech PIC s jádrem BL (BaseLine - 12bitů/33instrukcí) a MR (MidRange - 14bitů/35instrukcí) vytvořených někdy v roce 1900 před naším letopočtem, je z dnešního pohledu nešťastné. Dnes uživatelé očekávají mnohem komfortnější zařízení.
Jenže ono si moc nevybereš. Když se podíváš na internet po servo-dekodérech, tak je jenom minimum projektů které za něco stojí.
První z nich je asi tento: http://www.franksworkshop.com.au/ModelR ... ecoder.htm
Sice je "trošku" zastaralý a hodně součástek potřebných ke konstrukci už je ve výprodeji, ale vypadá že se v něm skrývá potenciál
Druhý je tento: http://www.wedis-basteleck.de/41002.html
evidentně vychází z prvního, ale je ořezaný ale je sestavený ze součástek které se za chvíli nepřestanou vyrábět (aspoň z většiny)
Oba jsou postavené na procesorech Mega, což je v porovnání s PICy úplně jiný liga a skýtá mnohem víc možností pro případný "tuning"
Uvažuji na d tím, že zkusím jeden z nich postavit a zjistit jak je na tom...
„Nejvyšší forma života je člověk. Nejnižší formou života je člověk který si hraje s vláčky.“ Holly
-

male zvire - Příspěvky: 232
- Registrován: stř 08 zář, 2010 4:35 pm
Re: Servo dekodér
![]() od cernos » pát 17 čer, 2011 6:35 pm
od cernos » pát 17 čer, 2011 6:35 pm
Mno po tom druhém kousku už jsem taky pokukoval. Výhodou je tam ten Atmel, podle mě mnohem lepší než PIC. Ještě by k tomu mohl být nějaký open source zdroják (alespoň hlavička a patička - jedná se mi o způsob zpracování DCC signálu). Po rozkódování DCC signálu už by se Atmelem nechalo ovládat cokoliv dalšího...
EDIT: Teď jsem si uvědomil kde jsem tento dekodér viděl. LokoPin ho ve svém článku o servech taky testoval.
EDIT: Teď jsem si uvědomil kde jsem tento dekodér viděl. LokoPin ho ve svém článku o servech taky testoval.
železničním modelářem od roku 2011 - TT, DCC
- cernos
- Příspěvky: 388
- Registrován: stř 09 úno, 2011 6:09 am
- Bydliště: Prachatice
Re: Servo dekodér
![]() od mpinta » ned 10 črc, 2011 7:30 am
od mpinta » ned 10 črc, 2011 7:30 am
Fuldovo verze 3.5 podle mne funguje v TC vyhovujícím způsobem!!! Má to ještě nějaké mouchy, ale na ovládání výhybek to lze v pohodě použít. Informace a příslušné linky již jsou ve zmiňovaném článku. Taky bych rád, aby se k otestování připojili fira, cernos, příp. i další.
Martin (LokoPin)
-

mpinta - Příspěvky: 783
- Registrován: úte 08 led, 2008 11:55 am
- Bydliště: Písek
Re: Servo dekodér
![]() od zdeno » pon 11 črc, 2011 9:14 am
od zdeno » pon 11 črc, 2011 9:14 am
ruseni serva je tehdy spatne, kdyz se pouziva pull-up odpor a ne natvrdo nastaveni 1/0. Dalsi problem je stabilita napajeni, kdy doporucuji rozvod 12-15V a stabilizovat na kazde deske samostatne. Silne nedoporucuji napajet z koleji pres DCC. Mam vyvinuty a odzkouseny ovladac na serva a jedine co tam chybi je prepinani srdcovky. Muze byt ovladany jak z Loconetu, tak z DCC. Clanek je na Railnet.sk.
moje konstrukce jsou na https://www.railnet.sk/autori.php?kto=aut&cislo=10
-

zdeno - Příspěvky: 3207
- Registrován: pon 11 črc, 2011 8:54 am
Re: Servo dekodér
![]() od fulda » úte 12 črc, 2011 6:41 am
od fulda » úte 12 črc, 2011 6:41 am
Ahoj,
ano, kvalita signálu pro servo může bejt problém, ale v tomto případě se používá klasické totemové zapojení dvou tranzistorů.
Hlavní problém je, jak jsi sám napsal, v realizaci napájecí části. To co je na stavebnici z DCCkoleje je dost špatné a nikdo se nezabejval tím, že by to nějak počítal.
ano, kvalita signálu pro servo může bejt problém, ale v tomto případě se používá klasické totemové zapojení dvou tranzistorů.
Hlavní problém je, jak jsi sám napsal, v realizaci napájecí části. To co je na stavebnici z DCCkoleje je dost špatné a nikdo se nezabejval tím, že by to nějak počítal.
Za pravopisné chyby v této zprávě může moje učitelka češtiny.
-
fulda - Příspěvky: 5380
- Registrován: pon 09 srp, 2010 8:08 am
- Bydliště: Praha - Uhříněves
Re: Servo dekodér
![]() od vvitty » úte 12 črc, 2011 10:13 am
od vvitty » úte 12 črc, 2011 10:13 am
Ahoj,
ruseni a obrana proti nemu je oblibena zabava vyvojaru elektroniky (zejmena kdyz zaroven musi vysvetlovat nakupcim, ze nelze seskrtat nektere zbytecne soucastky a usetrit na cene ). Kdyz se tak koukam na zapojeni z DCC koleje (neni tam schema, tak jen rychly nahled na layout), nebude proti ruseni prilis odolna uz samotna deska.
). Kdyz se tak koukam na zapojeni z DCC koleje (neni tam schema, tak jen rychly nahled na layout), nebude proti ruseni prilis odolna uz samotna deska.
- neni od veci blokovat procesor nejakou tou keramikou pobliz, idealne SMD mezi nozicky (coz se da dobastlit i beze zmen DPS zespodu). Odhadem tak 33 - 100 nF s nejakym slusnym dielektrikem. Tak, jak je proveden rozvod napajeni se na chodu procesoru projevi kazdy vetsi impulz.
- linearni regulatory je dobre zablokovat obdobne proti oscilacim, vetsina vyrobcu to ma i v doporucenych zapojenich. Opet nejlepe keramika v SMD primo mezi nozicky, v tomto pripade na nozicky pred zapajenim do DPS, at se to nemusi predelavat.
- pro delsi privody zkuste pouzit twisted cable (krizene kabely). Jsou o neco drazsi, ale ruseni z vnejsku omezi.
Vyse uvedena doporuceni plati i pro schema z Paco's webu.
PS: Kdyby nekdo shanel serva nebo jejich drzaky a nechtelo se mu resit proclivani s Ceskou Postou, mam oboje na webu. Od nabidky vlastni elektroniky me odrazuje nutnost alespon minimalnich mereni (napr. ruseni do okoli), na ktera mam vybaveni, ale uz ne cas a naladu
ruseni a obrana proti nemu je oblibena zabava vyvojaru elektroniky (zejmena kdyz zaroven musi vysvetlovat nakupcim, ze nelze seskrtat nektere zbytecne soucastky a usetrit na cene
- neni od veci blokovat procesor nejakou tou keramikou pobliz, idealne SMD mezi nozicky (coz se da dobastlit i beze zmen DPS zespodu). Odhadem tak 33 - 100 nF s nejakym slusnym dielektrikem. Tak, jak je proveden rozvod napajeni se na chodu procesoru projevi kazdy vetsi impulz.
- linearni regulatory je dobre zablokovat obdobne proti oscilacim, vetsina vyrobcu to ma i v doporucenych zapojenich. Opet nejlepe keramika v SMD primo mezi nozicky, v tomto pripade na nozicky pred zapajenim do DPS, at se to nemusi predelavat.
- pro delsi privody zkuste pouzit twisted cable (krizene kabely). Jsou o neco drazsi, ale ruseni z vnejsku omezi.
Vyse uvedena doporuceni plati i pro schema z Paco's webu.
PS: Kdyby nekdo shanel serva nebo jejich drzaky a nechtelo se mu resit proclivani s Ceskou Postou, mam oboje na webu. Od nabidky vlastni elektroniky me odrazuje nutnost alespon minimalnich mereni (napr. ruseni do okoli), na ktera mam vybaveni, ale uz ne cas a naladu
Stavebnice, díly, nářadí pro modeláře, - [url]https://www.pojezdy.eu/eshop[/url]
- vvitty
- Příspěvky: 2868
- Registrován: pát 28 pro, 2007 7:11 pm
- Bydliště: Praha
Re: Servo dekodér
![]() od male zvire » úte 12 črc, 2011 5:49 pm
od male zvire » úte 12 črc, 2011 5:49 pm
fulda & vvitty: což o to, teoretizovat umíte pěkně - to se Vám musí nechat, ale kdyby byla nějaká praktická ukázka toho, že Vaše teorie fungují tak bych byl mnohem radši (a asi bych nebyl sám)... 
„Nejvyšší forma života je člověk. Nejnižší formou života je člověk který si hraje s vláčky.“ Holly
-
male zvire - Příspěvky: 232
- Registrován: stř 08 zář, 2010 4:35 pm
Re: Servo dekodér
![]() od vvitty » úte 12 črc, 2011 6:03 pm
od vvitty » úte 12 črc, 2011 6:03 pm
male zvire: vezmi dekoder a zkus to
Stavebnice, díly, nářadí pro modeláře, - [url]https://www.pojezdy.eu/eshop[/url]
- vvitty
- Příspěvky: 2868
- Registrován: pát 28 pro, 2007 7:11 pm
- Bydliště: Praha
Re: Servo dekodér
![]() od fulda » stř 13 črc, 2011 6:55 am
od fulda » stř 13 črc, 2011 6:55 am
male zvire píše:fulda & vvitty: což o to, teoretizovat umíte pěkně - to se Vám musí nechat, ale kdyby byla nějaká praktická ukázka toho, že Vaše teorie fungují tak bych byl mnohem radši (a asi bych nebyl sám)...
Já už jsem to psal - moje verze HW funguje celkem dobře, je pravda, že to taky nepřeháním s filtrací, ale asi v N není takové rušení.
Nicméně poslední dva názory byly od lidí, co si chtěli "opravit" dekodér koupenej u dcckolejí.
Moje aktuální verze:
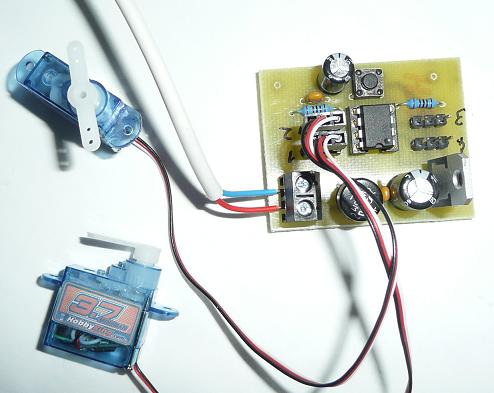
Pokud někoho nadchne, tak klidně dodám i podklady pro stavbu.
Taky zdaleka není dokonalá, chtěl bych do budoucna udělat ještě trochu jinou koncepci, ale to je na dlouho a mám to zařazeno až asi na šestém místě. co bych chtěl předělat, protože přehodit v kolejišti dekodér je celkem jednoduché.
Za pravopisné chyby v této zprávě může moje učitelka češtiny.
-
fulda - Příspěvky: 5380
- Registrován: pon 09 srp, 2010 8:08 am
- Bydliště: Praha - Uhříněves
Re: Servo dekodér
![]() od vvitty » stř 13 črc, 2011 7:04 am
od vvitty » stř 13 črc, 2011 7:04 am
Fuldo, dej tam aspon nejakou keramiku k napajeni toho PICe. Bude mu lepe
Staci zespodu DPS mezi nozicky. Tak 47nF...
Staci zespodu DPS mezi nozicky. Tak 47nF...
Stavebnice, díly, nářadí pro modeláře, - [url]https://www.pojezdy.eu/eshop[/url]
- vvitty
- Příspěvky: 2868
- Registrován: pát 28 pro, 2007 7:11 pm
- Bydliště: Praha
Re: Servo dekodér
![]() od fulda » stř 13 črc, 2011 7:46 am
od fulda » stř 13 črc, 2011 7:46 am
ja vím, mám jí lípnutou "zespoda", taky by bylo dobré dát mezi gretz a 7805 nějakej odpor aby se nemusel tlačit s celou usměrněnou složkou....
Asi se nad tím zamyslím ale paradoxně šum na procesoru není žádnej problém, daleko horší je šum na servech. Spíš nandám nějaké drobné kondíky do napájení každého serva.
Taky jsem drobně podcenil spotřebu serva "v klidu", takže spíš nějaké externí napájení a asi namísto 7805 nějakej DC/DC - třeba MC34063A nebo tak něco.
Asi se nad tím zamyslím ale paradoxně šum na procesoru není žádnej problém, daleko horší je šum na servech. Spíš nandám nějaké drobné kondíky do napájení každého serva.
Taky jsem drobně podcenil spotřebu serva "v klidu", takže spíš nějaké externí napájení a asi namísto 7805 nějakej DC/DC - třeba MC34063A nebo tak něco.
Za pravopisné chyby v této zprávě může moje učitelka češtiny.
-
fulda - Příspěvky: 5380
- Registrován: pon 09 srp, 2010 8:08 am
- Bydliště: Praha - Uhříněves
Re: Servo dekodér
![]() od male zvire » stř 13 črc, 2011 7:47 am
od male zvire » stř 13 črc, 2011 7:47 am
fulda: pokud ještě přidáš externí napájení tak se nadchnu
„Nejvyšší forma života je člověk. Nejnižší formou života je člověk který si hraje s vláčky.“ Holly
-
male zvire - Příspěvky: 232
- Registrován: stř 08 zář, 2010 4:35 pm
Re: Servo dekodér
![]() od fulda » stř 13 črc, 2011 8:06 am
od fulda » stř 13 črc, 2011 8:06 am
male zvire píše:fulda: pokud ještě přidáš externí napájení tak se nadchnu
Externí napájení je daleko větší problém, než se zdá na první pohled.
Pro to, abych dodržel NMRA RP-9.2.3 bych potřeboval bejt schopnej vytvářet ACK pulz do DCC sběrnice. Na to bych potřeboval jeden volnej výstup z PICe. Celkem logicky se nabízí sdílet ten, kterej je použitej pro tlačítko, ale ouha, to je GP3/MCLR, kterej je "pouze pro vstup". Takže aby to fungovalo, tak bych musel prohodit DCC vstup na GP3/MCLR a výstup na GP2/INT, ale tenhle software je napsanej tak, že pro čtení DCC používá rutinu volanou jako přerušení. Takže abych mohl přehodit tyhle dvě nožičky, znamená to přepsat celej program a nebo použít třeba jinej (větší) procesor. A jak už jsem napsal několikrát, ani jedno se mi momentálně nechce.
Za pravopisné chyby v této zprávě může moje učitelka češtiny.
-
fulda - Příspěvky: 5380
- Registrován: pon 09 srp, 2010 8:08 am
- Bydliště: Praha - Uhříněves
Re: Servo dekodér
![]() od vvitty » stř 13 črc, 2011 9:18 am
od vvitty » stř 13 črc, 2011 9:18 am
DC/DC bych na deskach neresil, prijde mi to zbytecna komplikace a zdrazeni desky. Zustal bych s klasickym linearem.
Sum na servech generuje motorek, u ktereho na tehle levnych a miniaturnich servech neni odruseni zadne. Podle layout z DCC koleje se bude sirit po cele desce rozvodem napajeni... U 5V napajeni zrejme bude dostatecna rezerva v minimalnim napajeni procesoru, tak se to neprojevi, ale pokud bych to mel davat na cele kolejiste (a jeste na cizi) tak bych ho k procesoru urcite dal.
Sum na servech generuje motorek, u ktereho na tehle levnych a miniaturnich servech neni odruseni zadne. Podle layout z DCC koleje se bude sirit po cele desce rozvodem napajeni... U 5V napajeni zrejme bude dostatecna rezerva v minimalnim napajeni procesoru, tak se to neprojevi, ale pokud bych to mel davat na cele kolejiste (a jeste na cizi) tak bych ho k procesoru urcite dal.
Stavebnice, díly, nářadí pro modeláře, - [url]https://www.pojezdy.eu/eshop[/url]
- vvitty
- Příspěvky: 2868
- Registrován: pát 28 pro, 2007 7:11 pm
- Bydliště: Praha
Kdo je online
Uživatelé procházející toto fórum: Žádní registrovaní uživatelé a 1 návštěvník