Diskuzní fórum železničních modelářů
Fórum pro českou komunitu železničních modelářů.
Točna TT
Moderátoři: Michal Dalecký, Jarda H.
![]() od Mauglí » ned 30 kvě, 2010 7:43 pm
od Mauglí » ned 30 kvě, 2010 7:43 pm
môžem vysustružiť obvodovu stenu jamy z duralu a vyvrtať do obvodu diery na polohovanie mostu v akýchkoľvek uhloch a počtoch otvorov,ale by to chcelo viac zaujemcov a podľa možnosti 2 alebo 3 priemery toční a dno si vykružite z plastovej tabuľky o hrúbke 2 až 3mm,prípadne vyrobím aj ložiskový stredný čap podľa požiadavky
Mauglí
- Mauglí
- Příspěvky: 78
- Registrován: ned 02 kvě, 2010 9:12 pm
- Bydliště: Malý Šariš 256,080 01PREŠOV
![]() od Mauglí » stř 02 čer, 2010 6:58 pm
od Mauglí » stř 02 čer, 2010 6:58 pm
O.K. díky za opravu,táto debata mi pripomína CNC Haidenhain iTNC 530,a,to Vám napíšem priamo program na vrtanie polôh na točni
CCx0y0
Lxo y polomer točne
LP PR polomer točne M99
LPIPA-uhol segmentu M99
to isté opakovať počtom polôh
CCx0y0
Lxo y polomer točne
LP PR polomer točne M99
LPIPA-uhol segmentu M99
to isté opakovať počtom polôh
Mauglí
- Mauglí
- Příspěvky: 78
- Registrován: ned 02 kvě, 2010 9:12 pm
- Bydliště: Malý Šariš 256,080 01PREŠOV
Re:
![]() od Rizoto » pon 02 srp, 2010 11:45 am
od Rizoto » pon 02 srp, 2010 11:45 am
Luis0 píše:Tomáš píše:no a co okopírovat továtní pohon třeba zmíněného ROCA ?
Myslím že je to nesmysl. Takový výrobek je podřízený technologii, u firmy jako je tahle předpokládám díly nastříkané z plastů a to je v malosériové produkci nereálné provést.
Musí se to prostě navrhnout od základu a udělat pomocí dostupných technologií. Polohování není problém, k tomu jsou krokové motory a jejich řízení. Nějaké systémy s obyčejným motorkem narážkama, spínačema apod jsou nanic. To bude vždycky nespolehlivé.
Krokovy motor tiež nie je idealny pretože ten ma určitý krok. Väčšinou 1.8°, 0,9°. Ano, je to malý krok ale niekedy to môže robiť problém. Da sa to vyriešiť aj posunutím koľaje tak aby to presne vychádzalo. Taktiež motor nemôže otačať celou točnou bez prevodu. Takže neodpadá problém z prevodovkou. Ktorá by vyriešila aj problem veľkých krokov motoru. Na druhej strane sa da pomocou elektroniky s mikrokontrolerom presne riadiť krokový motor.
-

Rizoto - Příspěvky: 190
- Registrován: ned 29 lis, 2009 10:18 am
- Bydliště: Orava, Slovensko
Re: Točna TT vers. funkční točna N (PECO)
![]() od Honza168 » stř 18 srp, 2010 9:11 pm
od Honza168 » stř 18 srp, 2010 9:11 pm
Otázku položil kolega, co kutí v měřítku TT. Já se pohybuju v menších rozměrech (N), nicméně dovoluji si pro inspiraci něco málo k tématu TOČNA připodotknout. Jednak se mohu pochlubil takovým zajímavým unikátem, který se údajně na českých (slovenských) drahách nevyskytoval. Ale pár kilometrů za hranicemi v NDR už ano. Říká se tomu segmentová točna a vypadá to tak, jsem jsem popsal realitu i model na svém webu: http://www.honzikovyvlacky.cz/2010/07/0 ... detail-de/
No, a k té točně, co se točí dokola. Mám ji hotovou, funkčně odzkoušenou, ale v krabici, protože nemám kolejiště. A bohužel, jen kvůli vlastní lenosti a zanícením pro jiná témata jsem stavbu zatím napopsal a nepublikovat. Tak jen stručně: Korpus točny jsem koupil za pár liber od PECO v Anglii. Taky jsem četl Houmrův návod (a řadu dalších) a taky jsem na převody zvažoval Merkur, ale tohle řešení je opravdu hodně primitivní a pro malá měřítka nepoužitelné. Jelikož vše plánuji v digitálu, zvolil jsem velmi jednoduché řešení ovládání točny přes servo (pro letadýlka, nejlevnější, čínské, za 80 Kč - protože: těch pohybů, co servo udělá za rok, je asi milionkrát méně než musí udělat na křidélku létajícího modelu; tedy určitě vydrží, i když je z Číny!). Vykuchal jsem z něho převody a mikrospínač pro omezení pohybu. Zbyl vlastně jen motorek. Impulzy k pohybu dostává servo z dekodéru, který ovládám z ovladače LENZ), co řídí vlaky, a který můj vnouček nazývá "dědova kalkulačka". V nejpomalejším režimu pohybu se trefím s nastavením kolejí na chlup přesně. Servo je v ose připojené k ose mostovky přes takový vlastnoručně vymyšlený hen ten oný bazmek. Žádný zázrak - kolík, o-kroužek a troška modelovací hmoty. Za "vynález" hodný zřetele považuji pružné bloky zhotoveného ze silikonu, které zaručují pružné spojení serva s korpusem točny.
Točnu jsem ale vylepšil. Jednak jsem na dno šachty nalepil kolej (Tilling od Daleckého), kterou jsem pracně ohnul do kruhu a přilepil na dno, okolo jsem pak nadělal pražce. Mostovka doznala zásadní změnu v tom, že jsem imitace pojezdových kol nahradil skutečnými miniaturními ložisky. Úžasně se zlepšil pohyb mostovky. Trošku barvení a patinování na závěr. Jo a taky jsem tam přidělal budku pro obsluhu, k čemuž mne inspiroval Houmr a návštěva muzea v Lužné.
Jelikož sem ale neumím vložit obrázek(ky), kdo má zájem, musí si jej(je) vyžádat mailem. Zdraví Honza168.
No, a k té točně, co se točí dokola. Mám ji hotovou, funkčně odzkoušenou, ale v krabici, protože nemám kolejiště. A bohužel, jen kvůli vlastní lenosti a zanícením pro jiná témata jsem stavbu zatím napopsal a nepublikovat. Tak jen stručně: Korpus točny jsem koupil za pár liber od PECO v Anglii. Taky jsem četl Houmrův návod (a řadu dalších) a taky jsem na převody zvažoval Merkur, ale tohle řešení je opravdu hodně primitivní a pro malá měřítka nepoužitelné. Jelikož vše plánuji v digitálu, zvolil jsem velmi jednoduché řešení ovládání točny přes servo (pro letadýlka, nejlevnější, čínské, za 80 Kč - protože: těch pohybů, co servo udělá za rok, je asi milionkrát méně než musí udělat na křidélku létajícího modelu; tedy určitě vydrží, i když je z Číny!). Vykuchal jsem z něho převody a mikrospínač pro omezení pohybu. Zbyl vlastně jen motorek. Impulzy k pohybu dostává servo z dekodéru, který ovládám z ovladače LENZ), co řídí vlaky, a který můj vnouček nazývá "dědova kalkulačka". V nejpomalejším režimu pohybu se trefím s nastavením kolejí na chlup přesně. Servo je v ose připojené k ose mostovky přes takový vlastnoručně vymyšlený hen ten oný bazmek. Žádný zázrak - kolík, o-kroužek a troška modelovací hmoty. Za "vynález" hodný zřetele považuji pružné bloky zhotoveného ze silikonu, které zaručují pružné spojení serva s korpusem točny.
Točnu jsem ale vylepšil. Jednak jsem na dno šachty nalepil kolej (Tilling od Daleckého), kterou jsem pracně ohnul do kruhu a přilepil na dno, okolo jsem pak nadělal pražce. Mostovka doznala zásadní změnu v tom, že jsem imitace pojezdových kol nahradil skutečnými miniaturními ložisky. Úžasně se zlepšil pohyb mostovky. Trošku barvení a patinování na závěr. Jo a taky jsem tam přidělal budku pro obsluhu, k čemuž mne inspiroval Houmr a návštěva muzea v Lužné.
Jelikož sem ale neumím vložit obrázek(ky), kdo má zájem, musí si jej(je) vyžádat mailem. Zdraví Honza168.
-

Honza168 - Příspěvky: 131
- Registrován: ned 13 zář, 2009 1:06 pm
- Bydliště: Praha
Re: Točna TT
![]() od Michal Vaniš » čtv 19 srp, 2010 7:56 pm
od Michal Vaniš » čtv 19 srp, 2010 7:56 pm
Po dohodě uveřejňuji fotky točny Peco N od Honzy168

Točna PECO vel.N po úpravách - uložení serva ve
dvou pružných blocích ze silikonu (Lukopren)

Točna PECO vel.N po úpravách - uložení
miniaturních ložisek v mostu točny PECO, které se pohybují po kolejnici
přilepené na dně jámy točny.

doplnění točny - mostní budka (z balzy)
Točna PECO vel.N po úpravách - uložení serva ve
dvou pružných blocích ze silikonu (Lukopren)
Točna PECO vel.N po úpravách - uložení
miniaturních ložisek v mostu točny PECO, které se pohybují po kolejnici
přilepené na dně jámy točny.
doplnění točny - mostní budka (z balzy)
TT+TTe,III-IV ep,ČSD-DR,autor manuálu pro EN Wintrack
Každé vylepšení generuje nové nedostatky
Každé vylepšení generuje nové nedostatky
-

Michal Vaniš - Příspěvky: 399
- Registrován: pát 10 črc, 2009 4:51 pm
- Bydliště: České Budějovice
Re: Točna TT
![]() od fulda » pon 23 srp, 2010 8:57 am
od fulda » pon 23 srp, 2010 8:57 am
Ahoj ve spolek,
Trochu jsem přemejšlel nad tím, jak elektronicky vyřešit točnu.
Budu vycházet z modelu "gramofon" - tedy pohon pod točnou a mostek se bude otáčet na ose pohonu.
Začnu přesností - pokud bych realizoval snímač s přesností 10bitů (1024 kroků = 0,3° - to jest 0,6mm při délce mostku 20cm), bude cena snímače zhruba 400,- a mechanická náročnost bude malá. Přesnost je možné ještě vylepšit, ale pak už bude nutné použít nějakou sofistikovanou převodovku a několik snímačů a cena by byla zhruba trojnásobná (1200,- za snímač)
Motorek a převodovka vyjdou v jednoduchém případě na cca 600,- a je celkem jedno, jestli krokovej motorek a jednoduchá převodovka a nebo stejnosměrnej motorek a sofistikovanější převodovka. (Tady bych trochu počkal, až Luděk usuší dílnu)
Další záležitostí je dekodér. (analogem se s dovolením nebudu zabejvat).
Jak jsem si všimnul v diskuzi, spousta lidí rádo ovládá točnu ručně - tedy pomocí loko dekodéru, na druhou stranu automatické řízení je maximálně praktické.
Dokázal bych si představit speciální dekodér, kterej bude pracovat v následujícím režimu:
Základní funkce bude jako jednoduchej loko dekodér (žádné funkce jako ABC, stejně nemají žádnou cenu).
Pokud si postavím točnu na správnou pozici, budu si jí moci uložit (zapíšu do definovaného CV hodnotu, do kolikáté pozice chci momentální polohu uložit, podobně jako se resetuje loko dekodér)
Druhá funkcionalita by byla v podstatě stejná jako u vyhybkového dekodéru. Tedy například pokud chci, aby se točna sama otočila do pozice 4, tak na ovladači přehodím vyhybku 4 z polohy _/ do polohy -- a točna sama doběhne do příslušné polohy a zastaví se.
Tohle ovládání by mohlo celkem dobře fungovat, pokud ovládáte kolejiště myškou. Nemám moc zkušenosti, jak se definuje točna v ovládacích programech jako je RailCo - pokud je tam nějaká definice, tak mi jí prosím popište.
A ještě jeden snadno odstranitelnej nedostatek - pokud má správně fungovat zobrazení polohy na myškách, tak by bylo dobré, aby točna poslala informaci o tom, že opustila příslušnou polohu. To bych si dovedl představit tak, že sama točna bude obsahovat funkci TCO a jako slave zařízení pošle informaci o tom, že vyhybka (4) byla přepnuta z polohy -- do polohy _/ v případě, že se točna rozběhne (ať už ručně pomocí loko dekodéru a nebo automaticky přesunem do jiné pozice).
Na dekodéru by se mohla dát nastavit i funkce "přichytávání" - tedy tak jak normální loko dekodér dojíždí pokud zastavím lokomotivu, tak tenhle by mohl dojíždět pokud zastvím točnu v blízkosti +-X° od uložené pozice.
Otázka zní - má cenu vymejšlet takhle komplikovanej dekodér? a takhle sofistikované řízení točny?
Jindra
Trochu jsem přemejšlel nad tím, jak elektronicky vyřešit točnu.
Budu vycházet z modelu "gramofon" - tedy pohon pod točnou a mostek se bude otáčet na ose pohonu.
Začnu přesností - pokud bych realizoval snímač s přesností 10bitů (1024 kroků = 0,3° - to jest 0,6mm při délce mostku 20cm), bude cena snímače zhruba 400,- a mechanická náročnost bude malá. Přesnost je možné ještě vylepšit, ale pak už bude nutné použít nějakou sofistikovanou převodovku a několik snímačů a cena by byla zhruba trojnásobná (1200,- za snímač)
Motorek a převodovka vyjdou v jednoduchém případě na cca 600,- a je celkem jedno, jestli krokovej motorek a jednoduchá převodovka a nebo stejnosměrnej motorek a sofistikovanější převodovka. (Tady bych trochu počkal, až Luděk usuší dílnu)
Další záležitostí je dekodér. (analogem se s dovolením nebudu zabejvat).
Jak jsem si všimnul v diskuzi, spousta lidí rádo ovládá točnu ručně - tedy pomocí loko dekodéru, na druhou stranu automatické řízení je maximálně praktické.
Dokázal bych si představit speciální dekodér, kterej bude pracovat v následujícím režimu:
Základní funkce bude jako jednoduchej loko dekodér (žádné funkce jako ABC, stejně nemají žádnou cenu).
Pokud si postavím točnu na správnou pozici, budu si jí moci uložit (zapíšu do definovaného CV hodnotu, do kolikáté pozice chci momentální polohu uložit, podobně jako se resetuje loko dekodér)
Druhá funkcionalita by byla v podstatě stejná jako u vyhybkového dekodéru. Tedy například pokud chci, aby se točna sama otočila do pozice 4, tak na ovladači přehodím vyhybku 4 z polohy _/ do polohy -- a točna sama doběhne do příslušné polohy a zastaví se.
Tohle ovládání by mohlo celkem dobře fungovat, pokud ovládáte kolejiště myškou. Nemám moc zkušenosti, jak se definuje točna v ovládacích programech jako je RailCo - pokud je tam nějaká definice, tak mi jí prosím popište.
A ještě jeden snadno odstranitelnej nedostatek - pokud má správně fungovat zobrazení polohy na myškách, tak by bylo dobré, aby točna poslala informaci o tom, že opustila příslušnou polohu. To bych si dovedl představit tak, že sama točna bude obsahovat funkci TCO a jako slave zařízení pošle informaci o tom, že vyhybka (4) byla přepnuta z polohy -- do polohy _/ v případě, že se točna rozběhne (ať už ručně pomocí loko dekodéru a nebo automaticky přesunem do jiné pozice).
Na dekodéru by se mohla dát nastavit i funkce "přichytávání" - tedy tak jak normální loko dekodér dojíždí pokud zastavím lokomotivu, tak tenhle by mohl dojíždět pokud zastvím točnu v blízkosti +-X° od uložené pozice.
Otázka zní - má cenu vymejšlet takhle komplikovanej dekodér? a takhle sofistikované řízení točny?
Jindra
Za pravopisné chyby v této zprávě může moje učitelka češtiny.
-

fulda - Příspěvky: 4918
- Registrován: pon 09 srp, 2010 8:08 am
- Bydliště: Praha - Uhříněves
Re: Točna TT
![]() od pekl024 » úte 15 lis, 2011 12:31 pm
od pekl024 » úte 15 lis, 2011 12:31 pm
Nechci zakládat nové téma , tak to šoupnu sem.
Co použít k výrobě točny starý gramofon.
Co použít k výrobě točny starý gramofon.
Základ je spokojenost, https://pekl024.rajce.idnes.cz/Bezdruzicka_lokalka_TT/
-

pekl024 - Příspěvky: 900
- Registrován: čtv 11 lis, 2010 2:40 pm
- Bydliště: Plzeň
Re: Točna TT
![]() od fulda » úte 15 lis, 2011 1:37 pm
od fulda » úte 15 lis, 2011 1:37 pm
Nevím jakou to má přednost?
Gramofon se točí 32 nebo 44 otáček za minutu a to by mašinky dost lítaly.
Gramofon se točí 32 nebo 44 otáček za minutu a to by mašinky dost lítaly.
Za pravopisné chyby v této zprávě může moje učitelka češtiny.
-
fulda - Příspěvky: 4918
- Registrován: pon 09 srp, 2010 8:08 am
- Bydliště: Praha - Uhříněves
Re: Točna TT
![]() od pekl024 » úte 15 lis, 2011 1:48 pm
od pekl024 » úte 15 lis, 2011 1:48 pm
Myslel jsem vyndat motor a ruční pohon, šli by otáčet i menší soupravy.
pro SN
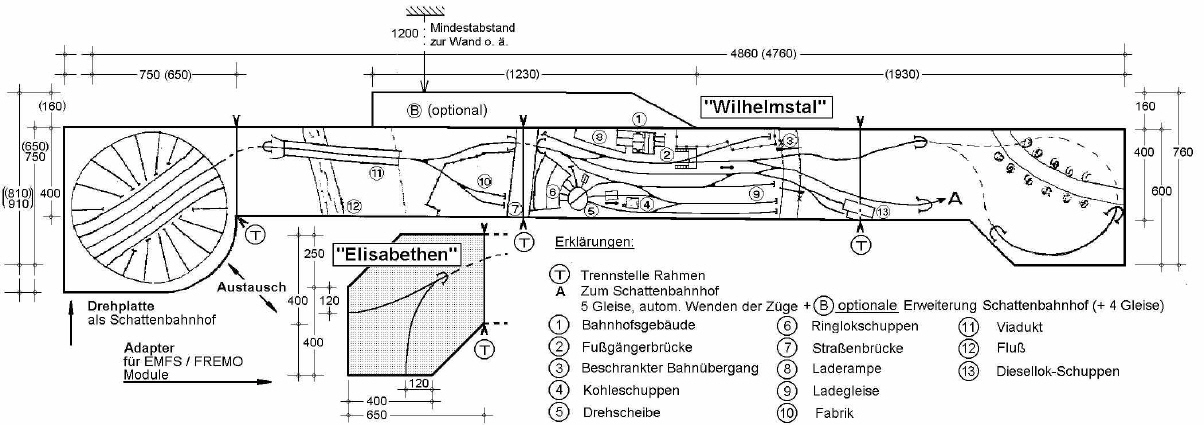
http://www.wek-bahn.com/images/mobaplanemfs2.jpg
pro SN
http://www.wek-bahn.com/images/mobaplanemfs2.jpg
{kind=link}
Základ je spokojenost, https://pekl024.rajce.idnes.cz/Bezdruzicka_lokalka_TT/
-
pekl024 - Příspěvky: 900
- Registrován: čtv 11 lis, 2010 2:40 pm
- Bydliště: Plzeň
Re: Točna TT
![]() od fulda » úte 15 lis, 2011 4:46 pm
od fulda » úte 15 lis, 2011 4:46 pm
K tomu se dá napsat delší literární dílo, ale pokusím se to napsat ve stručnosti.
Točna má dvě až tři části které je potřeba vyřešit.
Tak, mechanika je celkem jednoduchá a většina lidí tady si jí dovede představit. Je celkem jedno, jestli točíte stejnosměrným motůrkem, 3 fázovým motorem a nebo krokovým motorem, jen si tím zjednodušujete nebo zesložiťujete náročnost počítání poslední části polohy.
Co se týká určení polohy stolu - hodně lidí tu propaguje krokové motory, které ale tuto problematiku nijak nezjednodušují. Pokud mám točnu, která byla zapnuta v náhodné poloze, stejně nejsemschopen určit v jaké to bylo. Krokový motor mi umožňuje dělat přesně velké kroky, ale vztažené relativně k aktuální pozici. Takže stejně potřebuji najít nějakej začátek.
Moje metoda určení polohy pomocí kompasu je jasná - mám kompas a nad ním točím magnetem, kompas má sám od sebe digitální výstup a určuje polohu tak, že kruh rozdělí na 4096 dílků s nulou přesně tam kde je tečka na integráči.
Pro velké točny se používá jiná metoda (ve škole jsme se jí učili jako metodu pro otáčení s předměty v automatizaci)
Řekněme, že moje točna má 8 koncovejch poloh, pak si vezmu film na kterej si udělám 8 sloupců a 3 řádky o celkovej délce jako je obvod točny. (na následujícím obrázku část "B") Na film vyvolám/vytisknu černé a průhledné čtverce, které vyjadřují polohu "oktantu" vyjádřeno v Grayově zrcadlovém kódu (vysvětlím dole). Film "nalepím" na obvod točny. Tím mohu pomocí 3 optozávor zajistit, aby točna doběhla do správného oktantu. To ale není dostatečná přesnost.
Pro dojetí na poslední přesné místo se používají měřící trojúhelníky. Tedy dva trojúhelníky, které se scházejí v místě kde má točna zastavovat. (na obrázku část "C") Zase použijeme dvě opto závory a výstup z nich přímopoužijeme pro otáčení motoru. Pokud prochází hodně světla, tak točím hodně, pokud málo, tak točím málo. Zcela přirozeně se motor zaství v cílové pozici.
Následující obrázek ukazuje takovej případ. "A" je jen číslo oktantu, "B" je vyjádření tohoto čísla v Grayově kódu pro hrubé určení polohy a "C" je pod každým oktantem pro přesné zastavení.
Hlavní přednost je, že pokud mám trojúhelníky "C" udělané pohyblivě, mohu polohu celkem jednoduše aretovat.
A jenom drobné vysvětlení Grayova kódu. To je kód, kdy se vždy mění pouze jeden bit mezi dvouma hodnotama. S oblibou se používá pro kódovaci kolečka. Vznikne tak, že si vezmu dva bity 0 a 1, když pak potřebuju další úroveň, tak to co mám tak zrcadlově otočím a přidám další úroveň. Pochopitelně se mřížka ve finální podobě netiskne.
Tak a tady končí teorie, teď ještě potřebujeme udělat celou žídící elektroniku, a to je docela náročné.
Točna má dvě až tři části které je potřeba vyřešit.
- mechanika otáčení - pro malé točny se řeší tak, že se otáčí osou, pro střední a větší se motor montuje do mostu a obíhá po obvodové kolejnici, nebo zubatém hřebenu. Nebo je motor zvenku a otáčí talířem pomocí třecího kolečka nebo řemínku, jako u gramofonu
- zjišťování polohy stolu - tady už de pomalu do tuhého. Pro malé točny se mi zdá vhodné řešení s mojim kompasem, pro velké točny se používá metoda založená na optickém snímání polohy, kterou popíšu později
- řídící elektronika - a tady je dost velkej kámen úrazu pro většinu lidí
Tak, mechanika je celkem jednoduchá a většina lidí tady si jí dovede představit. Je celkem jedno, jestli točíte stejnosměrným motůrkem, 3 fázovým motorem a nebo krokovým motorem, jen si tím zjednodušujete nebo zesložiťujete náročnost počítání poslední části polohy.
Co se týká určení polohy stolu - hodně lidí tu propaguje krokové motory, které ale tuto problematiku nijak nezjednodušují. Pokud mám točnu, která byla zapnuta v náhodné poloze, stejně nejsemschopen určit v jaké to bylo. Krokový motor mi umožňuje dělat přesně velké kroky, ale vztažené relativně k aktuální pozici. Takže stejně potřebuji najít nějakej začátek.
Moje metoda určení polohy pomocí kompasu je jasná - mám kompas a nad ním točím magnetem, kompas má sám od sebe digitální výstup a určuje polohu tak, že kruh rozdělí na 4096 dílků s nulou přesně tam kde je tečka na integráči.
Pro velké točny se používá jiná metoda (ve škole jsme se jí učili jako metodu pro otáčení s předměty v automatizaci)
Řekněme, že moje točna má 8 koncovejch poloh, pak si vezmu film na kterej si udělám 8 sloupců a 3 řádky o celkovej délce jako je obvod točny. (na následujícím obrázku část "B") Na film vyvolám/vytisknu černé a průhledné čtverce, které vyjadřují polohu "oktantu" vyjádřeno v Grayově zrcadlovém kódu (vysvětlím dole). Film "nalepím" na obvod točny. Tím mohu pomocí 3 optozávor zajistit, aby točna doběhla do správného oktantu. To ale není dostatečná přesnost.
Pro dojetí na poslední přesné místo se používají měřící trojúhelníky. Tedy dva trojúhelníky, které se scházejí v místě kde má točna zastavovat. (na obrázku část "C") Zase použijeme dvě opto závory a výstup z nich přímopoužijeme pro otáčení motoru. Pokud prochází hodně světla, tak točím hodně, pokud málo, tak točím málo. Zcela přirozeně se motor zaství v cílové pozici.
Následující obrázek ukazuje takovej případ. "A" je jen číslo oktantu, "B" je vyjádření tohoto čísla v Grayově kódu pro hrubé určení polohy a "C" je pod každým oktantem pro přesné zastavení.
Hlavní přednost je, že pokud mám trojúhelníky "C" udělané pohyblivě, mohu polohu celkem jednoduše aretovat.
A jenom drobné vysvětlení Grayova kódu. To je kód, kdy se vždy mění pouze jeden bit mezi dvouma hodnotama. S oblibou se používá pro kódovaci kolečka. Vznikne tak, že si vezmu dva bity 0 a 1, když pak potřebuju další úroveň, tak to co mám tak zrcadlově otočím a přidám další úroveň. Pochopitelně se mřížka ve finální podobě netiskne.
Tak a tady končí teorie, teď ještě potřebujeme udělat celou žídící elektroniku, a to je docela náročné.
Za pravopisné chyby v této zprávě může moje učitelka češtiny.
-
fulda - Příspěvky: 4918
- Registrován: pon 09 srp, 2010 8:08 am
- Bydliště: Praha - Uhříněves
Re: Točna TT
![]() od KE-pavuk » čtv 17 lis, 2011 8:27 pm
od KE-pavuk » čtv 17 lis, 2011 8:27 pm
Toto som si dal pred casom vyrezat laserom, no este stale to caka na poskladanie
- Přílohy
-
- zostava mosta
- P1010404.JPG (117.06 KiB) Zobrazeno 10729 krát
-
- laserom palena stavebnica tocne v TT
- P1010407.JPG (61.98 KiB) Zobrazeno 10729 krát
- KE-pavuk
- Příspěvky: 97
- Registrován: sob 20 srp, 2011 4:51 am
- Bydliště: Košice
Re: Točna TT
![]() od j p » sob 19 lis, 2011 9:28 pm
od j p » sob 19 lis, 2011 9:28 pm
Krasny model 23m tocny nabizi FiligranTT, ale predpokladam, ze tu si malokdo muze dovolit. Tak se alespon pokochejte obrazky a cerpejte inspiraci. Uhel paprsku 7,5 stupne.


A jeste navod ke stavbe v nemcine. Je tam videt reseni pohonu.
http://www.digitalzentrale.de/download/Drehscheibe_23m.pdf
A jeste navod ke stavbe v nemcine. Je tam videt reseni pohonu.
http://www.digitalzentrale.de/download/Drehscheibe_23m.pdf
Velikost TT: 1. Pennsylvania Railroad 1940-1960 2. CSD 1946-1993
- j p
- Příspěvky: 442
- Registrován: čtv 30 pro, 2010 1:54 pm
- Bydliště: Dansko
Re: Točna TT
![]() od Honza168 » sob 19 lis, 2011 10:05 pm
od Honza168 » sob 19 lis, 2011 10:05 pm
KE-pavuk píše:Toto som si dal pred casom vyrezat laserom, no este stale to caka na poskladanie
"Vono to cáká na poskladanie.." To je ale super mazanina a navíc blábol. Divím se moderátorovi této rubriky, že takové stupidní příspěvky nesmaže. Zvláště když je píše pan Roman Bako z Košic, kterému jsou cizí autorská (a zřejmě i jiná) práva a z ukradených nápadů jiných si dělá vlastní kšeft.. (mluvím o Pintových držácích serva). Teď nám snad začne radit, jak postavit točnu! Asi bude potřeba se poptat obchodní inspekce, kolik už odvedl na daních za odcizené nápady...
-
Honza168 - Příspěvky: 131
- Registrován: ned 13 zář, 2009 1:06 pm
- Bydliště: Praha
Re: Točna TT
![]() od romino » sob 19 lis, 2011 10:58 pm
od romino » sob 19 lis, 2011 10:58 pm
Honza168 píše:"Vono to cáká na poskladanie.." To je ale super mazanina a navíc blábol. Divím se moderátorovi této rubriky, že takové stupidní příspěvky nesmaže. Zvláště když je píše pan Roman Bako z Košic, kterému jsou cizí autorská (a zřejmě i jiná) práva a z ukradených nápadů jiných si dělá vlastní kšeft.. (mluvím o Pintových držácích serva). Teď nám snad začne radit, jak postavit točnu! Asi bude potřeba se poptat obchodní inspekce, kolik už odvedl na daních za odcizené nápady...
Nehnevajte sa na mňa za to čo napíšem, ale je to už dosť úbohé z vašej strany. Rozoberáte tu niečo čo už bolo rozobraté inde podľa všetkého len preto, že ponúka podobný tovar ako sa nachádza vo Vašom obchode a pritom to namá s touto témou absolútne nič spoločné. Pokiaľ ide o to "radenie ako postaviť točňu", tak kľudne môže. Prednedávnom, po zhliadnutí jeho výpalkov som sa rozhodol stavať presuvňu pre stanicu presne rovnakým spôsobom. Teraz si pripravujem podklady na pálenie. Jeho príspevok je v tejto téme opodstatnený, čo sa ale nedá povedať o tom vašom.
A pokiaľ chcete uvádzať niekoho mená na spôsob obviňovania, tak si aspoň zistite ako sa dotyčná osoba správne volá a uveďte to tak. S pozdravom Roman Hložka
-

romino - Příspěvky: 238
- Registrován: ned 11 kvě, 2008 12:28 pm
- Bydliště: Nove Mesto nad Vahom, SR
Kdo je online
Uživatelé procházející toto fórum: Žádní registrovaní uživatelé a 2 návštevníků